Simon Dünser
Computer scientist with origins in mechanical engineering and a passion for robotics. I'm a research engineer at the Industrial Robotics Group of Inspire AG and the Advanced Manufacturing Lab, ETH Zurich, working on physics-based algorithms for robotic fabrication and manufacturing. My research interests revolve around path & trajectory planning, physical simulation and robot control. Preferably, I like to combine the three -- to solve complex problems through numerical optimization and methods of computational geometry.
Prior to my current position, I obtained my PhD at the Computational Robotics Lab, Department of Computer Science, ETH Zurich, under the supervision of Prof. Prof. Stelian Coros. Before, I worked on topics of visual computing at meepl / Fision AG (now Zalando SE) as a research software engineer, after earning my master's degree in mechanical engineering (computational fluid dynamics) from ETH Zurich.

Student Projects
If you are a student at ETH Zurich in the fields of robotics, computer science or mechanical engineering and want to explore smart algorithms to move big robots, please do get in touch. We're regularly looking for talented and self-motivated students to perform student projects at our group. Check out the list of open projects -- or contact me to discuss further possibilities.
Publications
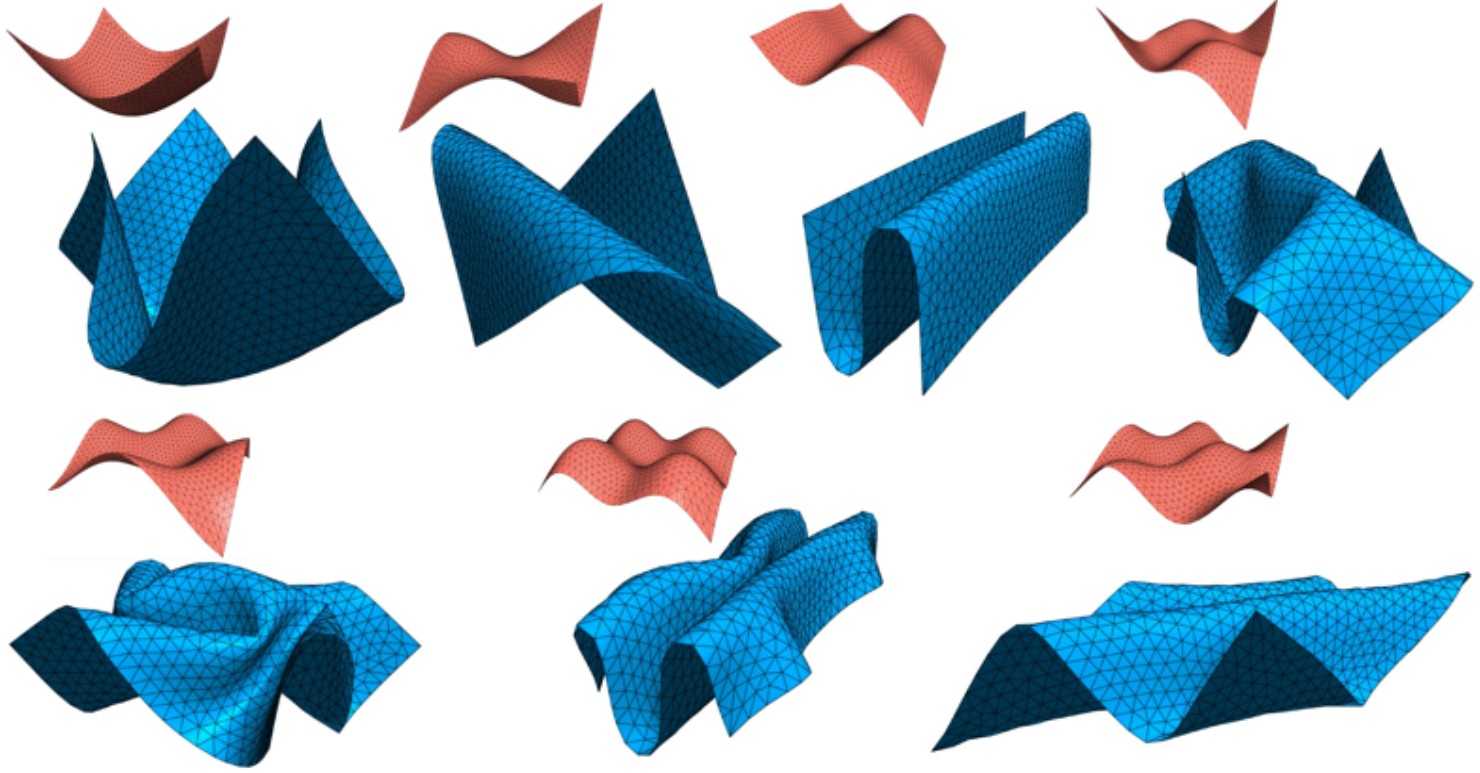
Nonlinear Compliant Modes for Large-deformation Analysis of Flexible Structures
ACM Transactions on Graphics (November 2022)
[Paper] [BibTex] [Video]